Our Robot factory is currently producing Android bodies designed as theatrical hominoids. The first units are hand crafted. Since templates are being produced of each model, we anticipate production line assembly in the near future. Some units have been protyped using automotive concepts of building wooden models, other models are fiberglass Future types will be upgraded using composite plastic, fiber glass, latex and aluminum for the structural body parts. Various skins are being contemplated from rigid to flexible. The design criteria depends upon the use of each particular android. Some will have communications, both vision and audio speech paths. The more expensive ones, the stars have Artificial intelligence as well as dynamic movement. The bit players may be similiar to mannequins but more apparently alive. All will have the ability to upgrade as systems become more available.

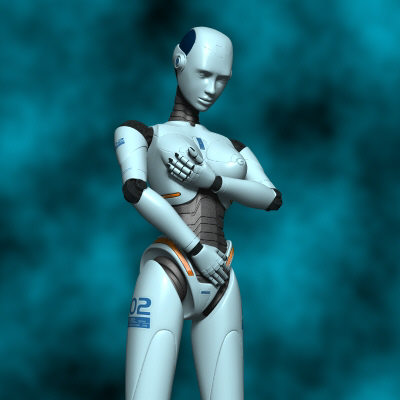
GRGCGMD-Sara New Arrival Flexible Arms!
Bust33"xWaist24.5"xHip34"xHeight5'11"
Female mannequin, with Arms by side. .
Fleshtone with Make-up
(This model comes nude with no hair. You supply wigs, and clothes appropriate for your establishment. Non animated, no electronics and limited upgrades available at this time.)
Buy now! $300.00 plus $45.00 Shipping and handling.
See more models here.
Bit players at this time have a cost of materials and labor of several thousand dollars, while a star Will have a cost of 5 to 20 times that amount.
Since our background in renovations is so extensive, we intend to be your one stop consultant with a staff of trained technicians, in the design of your Robotic/Android sound stage.
Home Pages
Conscious Quantum Supercomputer
Our First Robot Project 1977
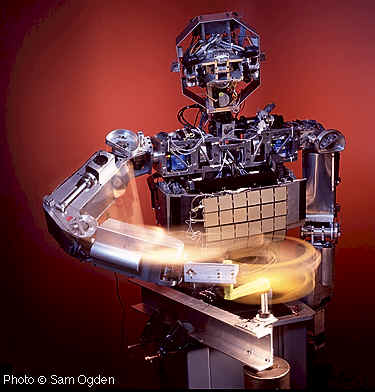
NASA Robonaut Project
Three Laws of Robotics are a set of three rules written by Isaac Asimov, which almost all positronic robots appearing in his fiction must obey.
Thirty years ago, our Company, "Systems Marketing Corporation" built our first robot.
"F1" was a theatrical robot built of wood, aluminum and various electronics componets was the hit of our rock opera, "The White Light Magic Show". The "Beast" sitting in front our house, looked like some robotic whale beached upon a dune. Supper came and went, while we speculated on how to turn our huge, unwieldy $15.00 investment into anything that could keep our enterprises together during the cold winter coming. "Let's build a robot, out of it" decided Georgine for the group.
While Patricia and Robert built the form of the robot, which was modeled after Patricia, Nigel stalked the streets hawking our prototype "Theatrical Robot" to the merchants of South Bend. The electronics consisted of an audio amplifier allowing two way speech path between the robot controller and the audience. The eyes consisted of an iris tube and neon emiter, which coupled with the speech made a compelling effect.
The right arm was partially articulated, and the body was covered with space angel clothing consisting of a flowing gown.
Several differant models were built over the years. "F2" survived until 1990 when Global Communications Group was born and later acquired Systems Marketing Corporations in 1993.
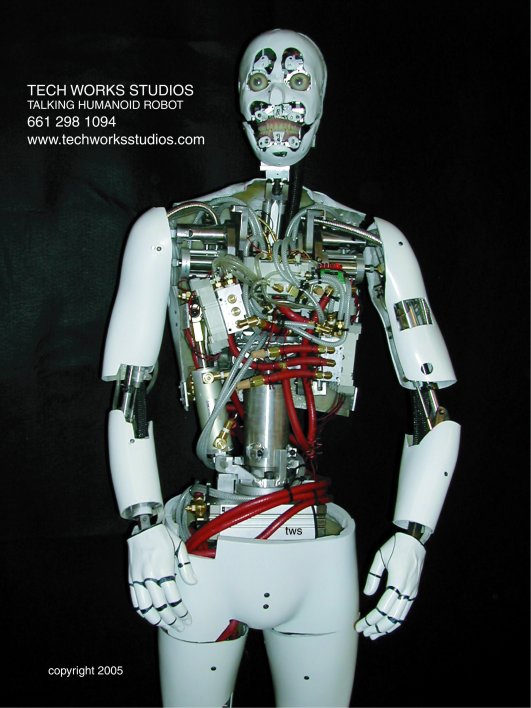
The focus of our present project, while still providing theatrical robots, will be to delevope increasingly more complex robots. The early models had limited articulation, two way communications and the appearance of being human. The new models will incorporate upgraded articulation, complex task assignments, artificial intelligence as well as many novel anthropomorphic devices.
The positronic brain of science fiction stories is now fact, photons produced through positron/electron annihilation, appear to be coded in a quantum state. Photons carry information. Perhaps the brain should have been named the photonic brain instead of positronic brain.
World's First Single Crystal Positron Source is Successfully Operated at the KEK B-Factory

Honda as well as a few other well known industrial concerns have built very sophisticated huminoid, "mechanical man" appearing robots, that can climb stairs, work on projects and perform other tasks. These all require supervision either by human interface or software command. Robots are not at this time aware so they may be a cheap labor force not concerned by minimum wage, only the level of nutrients in their fuel cell.



Here is a head made of Wal Mart Halloween skull, transparant mask and wig we put together for around $15.00. The head has built in led lights.
> Our 1977 project used a control system that consisted of a control hardwire that was 100 feet (30.7 meters), providing duplex communications with the human supervisor. Our premier protypes for the twenty first century will use 3-Com wireless systems that will interface our artificial intelligence computers. Since we have previous experience with Beowulf cluster supercomputers running linux, this may be a first stage area until we can obtain Quantum computers. A human supervisor may or may not accompany the AI computer as situation warrants. We call our supervisors "guardian angels"
09/09/07 This picture is our template, for the "Zeta Clone Male Robot", after knocking on my front door this afternoon. 09/13/07 This is the skeleton for the Zeta Clone Female Robot. She heard that her mate had come visiting, so she made the rounds also. Complete with a hard drive, speakers, floppy drive, cables, recorder and controller she looks more aware.
A control system can be thought of as a vast autonomous robot that can be overridden to varying degrees by human operators. But they are designed such that they respond correctly (hopefully) without human intervention. The system must do the right thing when shit strikes fans (loss of inputs and outputs, fires, chemical explosions, nuclear melt-down, that kind of thing) even when information is incomplete and the exact nature of the failure is unanticipated by the programmers. The interesting thing about control systems is that they are too complex to be understood in their entirety, firstly because their environment can never be completely modeled and secondly because of the staggering number of possible interactions between the many lines of software code and hardware components. These systems need to be autonomous and have always been designed that way from the ground up: they are immobots and they are doing much of the work that people used to do, and more.
Negotiator, the first affordable tatical robot for first responders.
Join the A. L. I. C. E. Artificial Intelligence Foundation
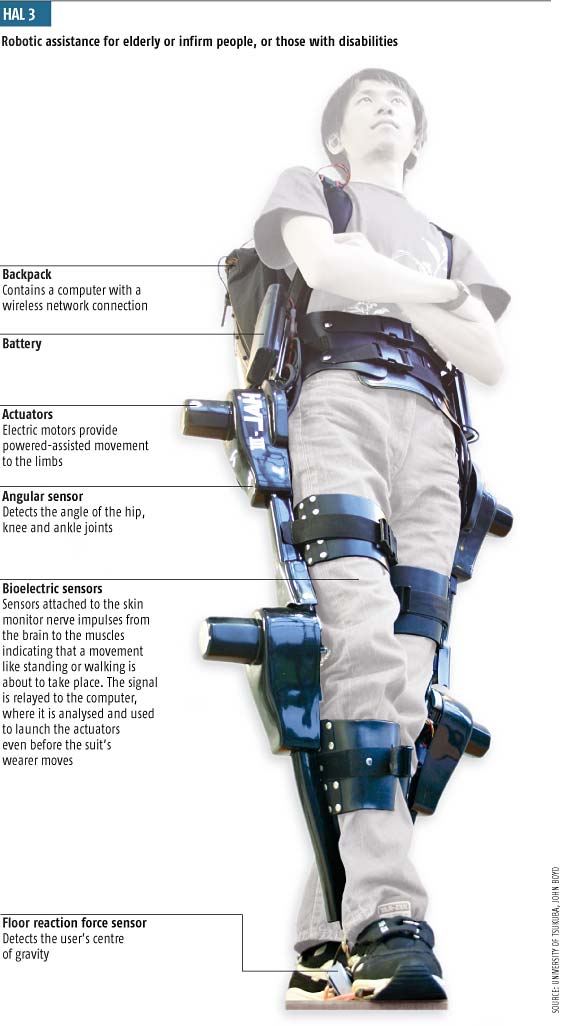
What if we build an exoskeleton for folks with atrophy of limbs? Thus Global Robotics was born on 09/07/07.
Below are some links dealing with research into quantum supercomputers.
Quantum computer
From Wikipedia, the free encyclopedia
WAO Kranius Owi Programmable Robot Kit (No Soldering Required)
Other Concepts: UAS Exploring future operational concepst for Unmanned Aerial Systems. New thinking on land transport systems.
- ROBOTS -
General Index by Topic to AI in the news
We have been marketing the following products since 1976
1.Flossy One F1 theatrical android 1977-1979
2. Nigel Robot theatrical android 1978-1978
3. Phoenix 1 spacecraft prototype 1theatrical robot 1978-1978
4. F2 1979-1990
5. Phoenix 1 spacecraft prototype 2 theatrical robot 1979-1979
6. Phoenix 1 spacecraft prototype 3 theatrical robot 1978-1978
7. Micah Robot 1988-1990
8. Hitachi PABX Telecommunications 1990-2007
9. Magnavox/Hughes Satellite Telecommunications 1992-1998
10. Marine Electronics/Solar Power 1993-Present
11. Internet Services 1995-Present
12. Global Supercomputer 2001-Present
13. 3Com Telecommunications 2007-Present
14. Zeta Clone Robot theatrical android 2007-Present
15. TJRC Robot theatrical android 2007-Present
16. DAN1 Robot worker android 2007-Present
17. ARC2 Robot Music android 2007-Present
18. JLP1 Robot A.I. android 2007-Present
We are currently preparing to release the following products.
FUTURE PRODUCTS
19. MRC2 Robot theatrical android
20. MSD1 Robot Security android
21. AJD1 Robot Household android
22. RRC1 Robot Quantum Supercomputer android
23. MEC1 Robot Industrial android
24. Robotic componentents hardware and software 2007
25. GCG1 Robot Conscious android
26. World Wide Telecommunications Robot Hub
27. STAR1 Robot Aerospace Pilot android
28. CLONE1 Robot Organic android
Global Communications Group
7216 Williams Rd.
Dunn & Bradstreet Rated: DUNS: 78-041-5014
Hall County License 23417
(Doing Business As)
Donate to our project, using the button below. Help an Android become aware and conscious! Security cameras & Surveillance systems, Free Shipping !!! on Orders Over $500
Speech Recognition for Mac OS X
Replacement Power Tool Batteries - Factory Prices and Same Day Shipping!
firstSTREET Tools & Gadgets






Agricultural Robotics
"Jane's"
Phoenix 1 Project 1978 on!
In March 1978, work was begun on the "Phoenix 1" flying saucer project for the "White Light Magic Show'. At the same time "Dr. Wizard and the Time Machine" was being produced and practiced.
Additional sound equipment was being manufactured and procured for this production. Kim and Mike led the way with Dr. Wizard, and the full show was presented at The University of North Florida, in May 1978. Rights were given to take this show on the road with WLMS.
The "Phoenix 1 Spacecraft Project" was started in the carport of my family's beach house, in St. Augustine Florida, around April 1978. My mother was dismayed at having to temporarily open up her nice, quiet orderly beach house to my flying saucer / time travel experiments, and to my more-than-a-little unconventional show business friends. She also surmised that our neighbors would not exactly be overjoyed to have such a machine sitting nearby, undergoing constant, and often very noisy renovations.
The flying saucer was originally built to be used as a static stage prop in our rock opera, "THE WHITE LIGHT MAGIC SHOW".
We used plywood to get the shape correct, with the idea that fiber glass would be the final covering. This form allowed the adaptation of our "Black Budget" gizmos which were obtained from military surplus and NASA surplus sales. Being intrigued with the concept of eventual flight of a similiar bird we started studying all available sources in order to make working air lock and portals for view ports.
NASA was very eager to help our fledgling aeorospace division "GEOMAGNETIC AVIONICS SYSTEMS". We determined that a hull would be vacuum proof if we could pump it up with three or more atmospheres without parts of ragged fiber glass ripping off the limbs of close by lurkers.
Flowery Branch
GA 30542 USA
Phone: (678) 887-2216
Fax (770)967-9415
Global Robotics, Planetary Communications, Chandler Telecom, Global Energy, Global Communications Group Inc., Global Communications Gp. Inc., Global Supercomputer, Global Communicater, Global Properties, Global Handymen, Camelot's Curios, Superbikes, Garden of Eden Center, Chandler Motorcycles, Global Marine, Geomagnetic Avionics Systems, Earth Station Satellite Systems, Wizard Jewelery, White Light Magic Show, Systems Marketing Corporation, colee.us, global33.net, global33.org, globalmarine.us, Interspace Robotics, Hog Town Holler and Colee and Associates.
Search this site!
![]()
To send money to us by credit card please click the buy now button below.
Key Phrases -
bandedge states, stationary state approach, modern classical mechanics,
slowly varying hamiltonian, free electron problem, stationary state problem,
hydrogen atom problem, triangular quantum, total angular momentum states,
harmonic oscillator problem,
tunneling problem, resonant tunneling structure, hamiltonian changes,
tunneling probability,
highest occupied band, effective mass theory, momentum matrix element,
scattering potential, quantum equations, spatial wavefunction, destruction operators,
band quantum, total degeneracy, scattering rate, spherically symmetric potential,
impact ionization transition rate, underlying semiconductor layer,
spatial quantization levels, confined quantum states, spatial quantization effects,
hole impact ionization rates, first conduction band, dot vector product,
impact ionization event, initiating carrier, most random configuration,
atomic core states, crystalline momentum, gamma valley, electron ionization rate,
equilibrium electron concentration, parabolic energy bands, electron carrier concentration,
expansion postulate, net absorption rate, ionization rate ratio,Monte Carlo, Uncertainty Principle, Periodic Table, Fundamental Postulate, Second Law of Thermodynamics, Substituting Eqs, Metal-Insulator-Semiconductor Junctions, Newton's Second Law of Motion, Photonic Detection, Newton's Laws of Motion,
lucky drift, excess electron concentration, excess noise factor, net generation rate,
Enjoy the convenience of these tools &
gadgets that make life easier.
10% off any Roomba robotic vacuum plus free shipping. Use coupon code ROOMBA